Mit einer virtuellen Realität für Fische haben Forschende aus Konstanz die -Steuerungsregelneines Fischschwarms entschlüsselt
Auf den Punkt gebracht
- Innovative Methode: Ein Team aus Biologen und Robotikingenieuren hat ein Virtual-Reality-System für Fische entwickelt, um deren Schwarmverhalten zu entschlüsseln
- Entdeckung des Algorithmus der Natur: Sie haben das natürliche -Steuerungsgesetzentdeckt, nach dem Zebrafische ihr Verhalten mit anderen koordinieren - ein Verhaltensalgorithmus, der über Jahrtausende hinweg optimiert wurde, um eine effektive kollektive Bewegung zu ermöglichen.
- Implikationen für die Robotik: Sie testeten das natürliche Steuerungsgesetz in Gruppen von Roboterautos, Drohnen und Wasserfahrzeugen und demonstrierten damit sein Potenzial für die Steuerung autonomer Fahrzeuge in der Zukunft.
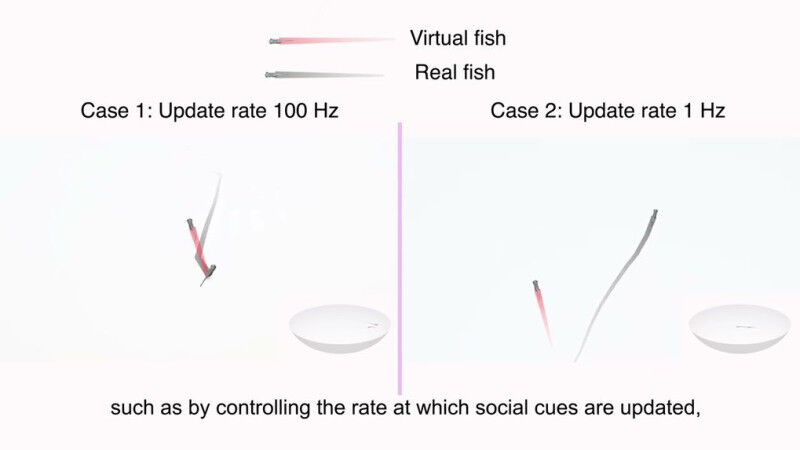
Fische sind Meister der koordinierten Bewegung. Fischschwärme haben keinen Anführer, dennoch schaffen es die einzelnen Tiere, in Formation zu bleiben, Zusammenstöße zu vermeiden und flexibel auf Veränderungen in ihrer Umgebung zu reagieren. Diese Kombination aus Flexibilität und Robustheit nachzuahmen ist seit jeher eine Herausforderung für vom Menschen entwickelte Systeme wie Roboter. Mit Hilfe von Virtual Reality für frei schwimmende Fische gelang einem Forschungsteam aus Konstanz nun ein wichtiger Schritt in Richtung dieses Ziels.
-Unsere Arbeit zeigt, dass Strategien, die sich über Jahrtausende hinweg in der Natur entwickelt haben, als Vorbild für robuste und effiziente Steuerungsalgorithmen in technischen Systemen dienen können-, so Erstautor Liang Li von der Universität Konstanz. Mitautor Máté Nagy von der Eötvös-Universität unterstreicht dies: -Die Entdeckung eröffnet spannende Möglichkeiten für zukünftige Anwendungen in der Robotik und für den Bau autonomer Fahrzeuge.-
Den verborgenen Algorithmus der Natur entschlüsseln
Um die breitere Anwendbarkeit der Ergebnisse zu testen, setzte das Team sie bei Schwärmen von Roboterautos, Drohnen und Booten ein. Die Roboter sollten einem beweglichen Ziel folgen, wobei die Forschenden entweder die Parameter des Zebrafisch-Algorithmus verwendeten oder eine hochmoderne, in autonomen Fahrzeugen eingesetzte Methode, die sogenannte Modellprädiktive Regelung (MPC). In allen Tests lieferte die von den Fischen entwickelte natürliche Steuerungsregel eine Leistung, die in Genauigkeit und Energieverbrauch kaum von der MPC zu unterscheiden war - und das bei einem Bruchteil an Komplexität.
Oliver Deussen, Mitautor der Studie und für Informatik an der Universität Konstanz sowie Sprecher des Exzellenzclusters Kollektives Verhalten, betont: -Unser Projekt unterstreicht die wechselseitige Beziehung zwischen Robotik und Biologie: Mithilfe der Robotik können wir biologische Mechanismen erforschen, die uns wiederum zu neuen und effektiven Strategien zur Steuerung von Robotern inspirieren können.-